در این جلسه به شبیه سازی یک روبات مسیر یاب دو سنسوره خواهیم پرداخت.
دانشجویان عزیز شما هم مراحل انجام این کار را همراه با مراحل زیر انجام دهید.
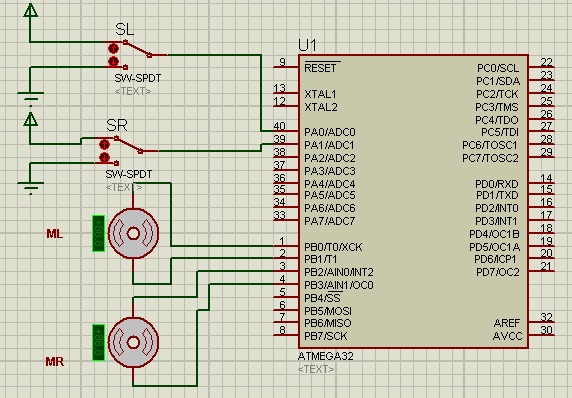
ابتدا سخت افزار روبات را در محیط پروتئوس مطابق با شکل زیر طراحی نمایید.در این شبیه سازی به جای سنسورهای مادون قرمز از یک switch دو حالته استفاده شده است. قطعات مورد نیاز برای شبیه سازی روبات عبارتند از:
1- میکرو کنترلر ATmega32
2- دو عدد motor DC
3- دو عدد switch-spdt
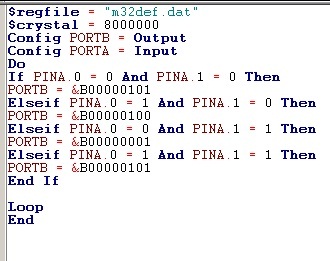
بعد از طراحی این سخت افزار در پروتئوس به محیط برنامه نویسی بسکام رفته و برنامه زیر را بنویسید.
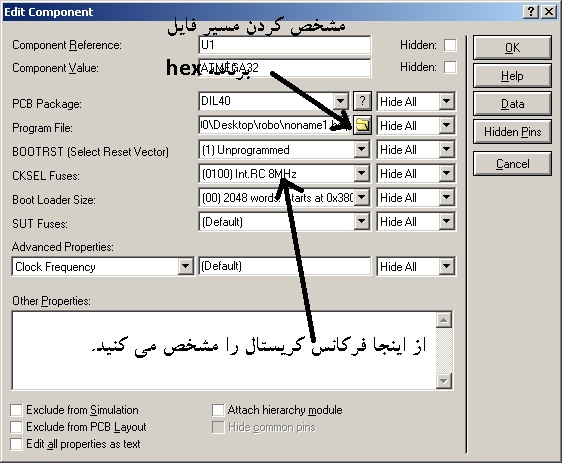
بعد از نوشتن برنامه مجددا به محیط پروتئوس رفته و برای انتقال برنامه به میکروکنترلر از روش زیر استفاده نمیایید.
برو رو میکرو کنترلر یک بار کلیک کرده و بعد از چند لحظه مکث مجددا برروی آن کلیک کنید در پنجره باز شده از طریق بخشی که با یک آیکن پوشه مشخص شده است مسیر برنامه خود را به میکرو میدهید.در شکل زیر این پنجره مشاهده می شود.
بعد از انجام این مراحل سخت افزار شبیه سازی شده آماده است. حال در محیط پروتئوس شبیه سازی را اجرا می کنیم تا از صحت عملکرد برنامه مطمئن گردیم.
:: بازدید از این مطلب : 5130
|
امتیاز مطلب : 17
|
تعداد امتیازدهندگان : 5
|
مجموع امتیاز : 5








